点击蓝字 关注我们
图 1 显示了 HVIC 的典型内部框图。主要功能模块包括输入级、欠压锁定保护、电平转换器和输出驱动级。栅极驱动器损耗包括:
当驱动器处于偏置状态且未进行开关时,高边和低边电路中静态电流相关的静态损耗。
当施加开关信号时与动态电流相关的动态损耗,与开关频率有关。
与负载开关电荷相关的栅极驱动损耗,直接依赖于开关频率。
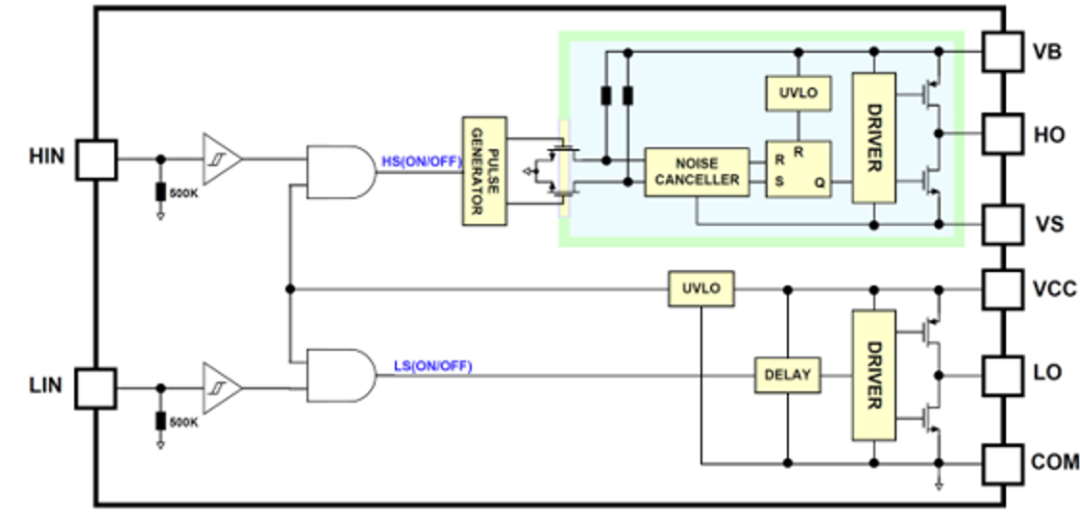
图 1. HVIC 框图
本文将不讨论自举二极管的损耗,因为二极管的电流包括在动态损耗中。然而,不容忽视的是启动过程中为自举电容充电的瞬时功率损耗。在此期间,会有大量电流流过二极管,对自举电容快速充电,并在几个开关周期内产生相对较高的损耗。自举二极管必须能承受这些电流和功率损耗,当二极管启动时,这部分损耗将增加驱动器的内部功率损耗。
图 2 显示了与高低边驱动器相关的半桥开关网络简化示意图,以解释静态损耗。
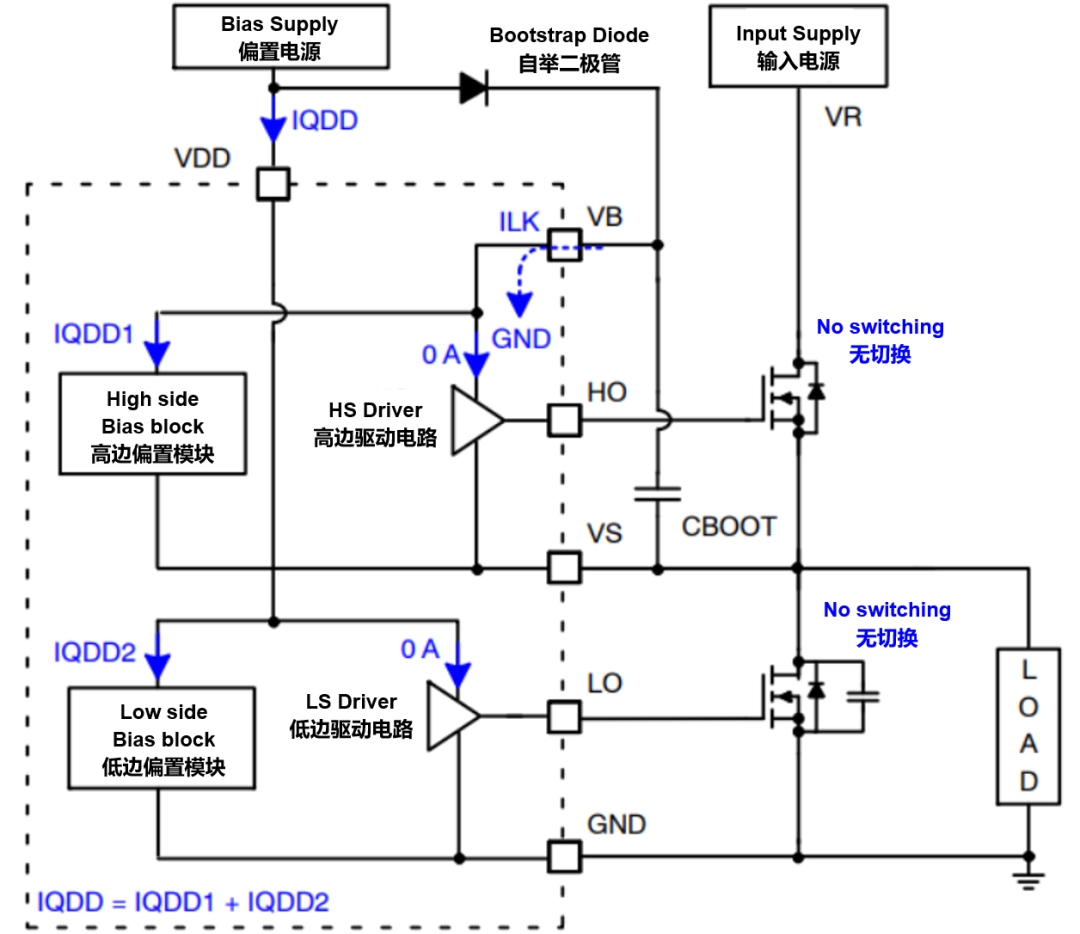
图 2. 针对静态功率损耗的驱动器和半桥配置的简化电路图
静态损耗,是由低边驱动器中直流电压源 VDD到地的静态电流,以及高边驱动器中电平转换器的漏电流引起的,如下式所示。
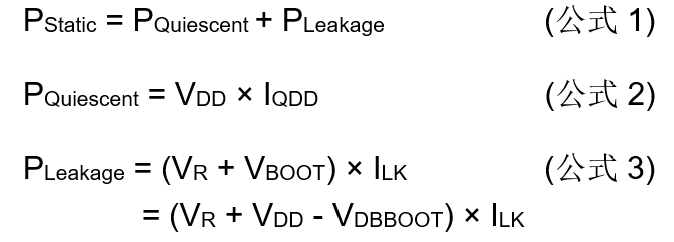
其中,IQDD为无输入开关信号时 VDD的静态电流,VBOOT为 CBOOT 上的电压,VDBOOT为自举二极管上的正向压降,VR为输入电源的轨电压,ILK为自举引脚(图 2 中 VB引脚)上的漏电流。静态功率损耗在驱动器接通电源后即一直存在,与输入信号的频率无关。
然而,大部分功率损耗在驱动器打开或关闭电源时产生。因此,IQDD包含在开关模式的工作电流中,所以在这种情况下不应考虑 PQuiescent。当 ILK 小到不足以忽略或 VBOOT电平非常高(如 1200 V )时,应考虑 PLeakage。如果驱动器数据手册中没有提供 ILK,则可以忽略这一损耗,它与其他损耗相比通常很小。
现在我们来考虑一下主要的损耗源。图 3 显示了解决动态损耗问题的驱动器电路图。第一种动态损耗是指高边驱动电平转换(LS)中的损耗,即 PLS。

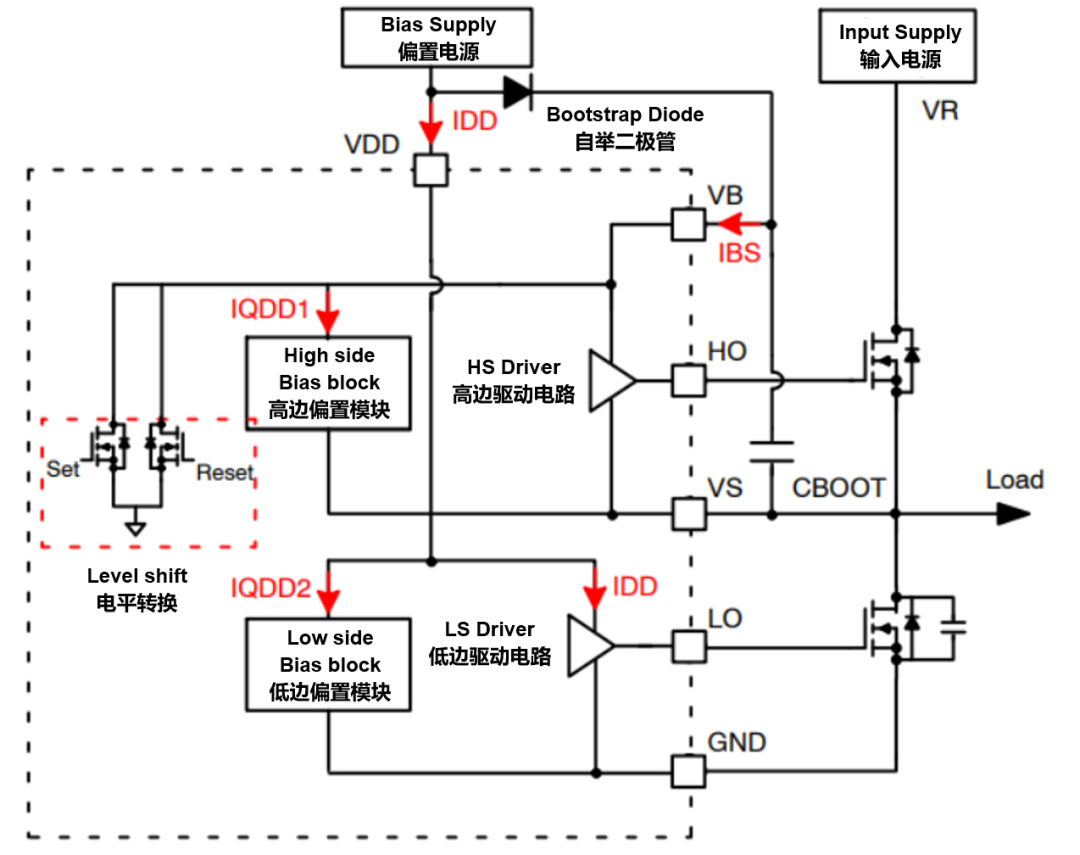
图 3. 驱动器和半桥配置的动态和功率损耗简化电路图
Qinternal是电平转换电路中使用的内部 LDMOS的总栅极电荷。制造商通常不提供Qinternal规范,因此数据手册中找不到。根据经验,在这种情况下, 600 V 高边驱动器的Qinternal值约为 0.6~1.5 nC,100 - 200 V 驱动器的Qinternal值约为 0.4~1 nC。一些使用旧技术的驱动器产品可能具有相对较高的 Qinternal值,因此在高频操作时应考虑 PLS,但在最新技术的驱动器中,该值越来越低,如果没有提供 Qinternal的值,则可以忽略该损耗。
第二项动态损耗,与 VDD和 VBOOT电源供电的输出级工作电流有关。当输出级驱动外部功率器件时,动态损耗(POP)由下面公式给出。

IDD是 VDD上的工作电流,IBS是高边驱动器引脚 VB 上的工作电流。这种功率损耗来自动态工作条件下的内部电流消耗。内部电流 IDD和 IBS,应在实际工作条件下参照数据手册参数,并考虑开关频率后确定。
如果数据手册没有提供 IDD和 IBS随开关频率变化的曲线,建议采用以下方法计算给定工作条件下的 IDD和 IBS。
如果在无负载时,IDD(或 IBS)工作在 20kHz(FSW_DS),那么在 100kHz(FSW)时的 IDD(或 IBS)大约是 20kHz 时的 5 倍,因为它与开关频率成正比。
为了更准确地计算,在乘以5之前,从IDD或IBS中减去静态电流。
例如,数据手册中20kHz时的工作电流(IPDD)为0.5mA,静态电流(IQDD)为0.05mA,100kHz时的IDD按以下公式计算。
FSW为目标频率,FSW_DS为数据手册中的指定频率。
如果数据手册中指定了IDD(或IBS)的负载条件,例如1 nF电容,则可以通过下式消除1 nF电容的电流影响。
需要注意的是,这个公式只是一个大致的估计,实际情况可能会因为电路的具体参数和工作条件而有所不同。在实际应用中,最好进行实际测量或使用仿真工具,来确定准确的电流值。

CLOAD是数据手册中规定的负载电容
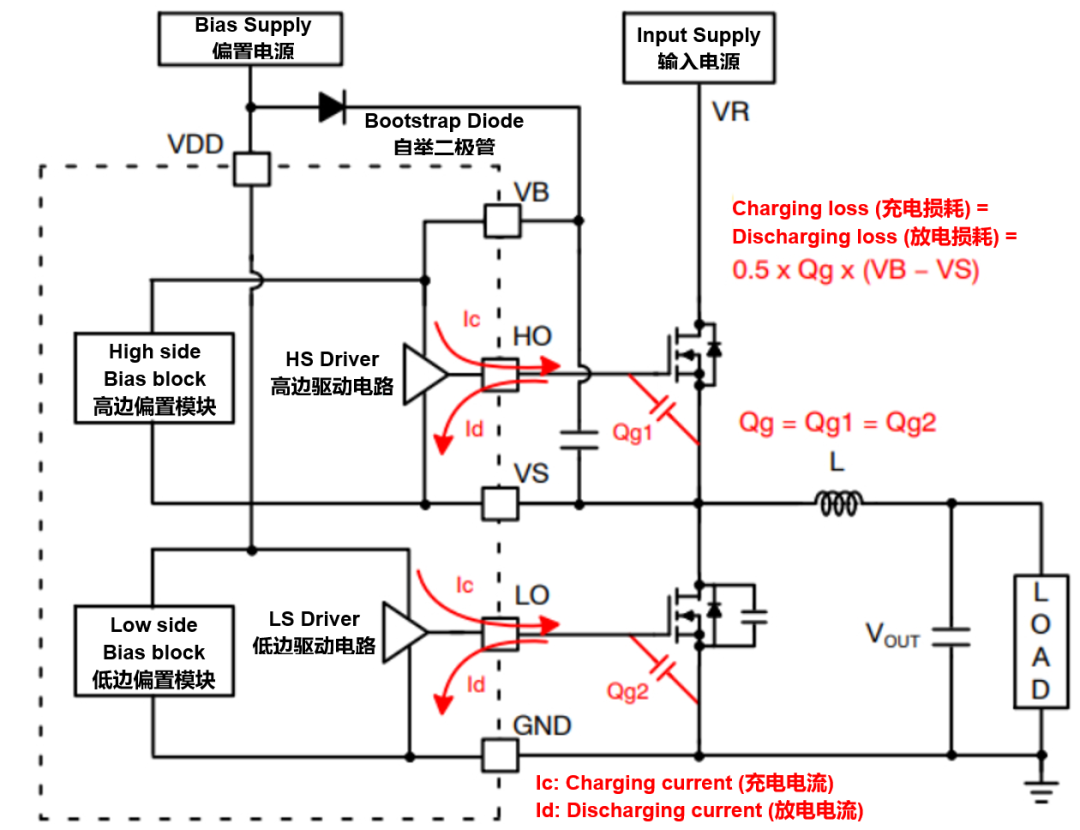
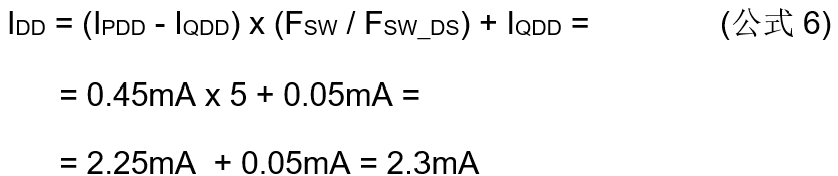
图 4. 栅极驱动功率损耗的驱动器和半桥配置简化电路图
驱动器中的栅极驱动损耗是在开关频率下提供栅极电流以开关负载 MOSFET 所产生的最大功率损耗。栅极驱动损耗来自负载电容的充电和放电(对于 MOSFET,负载电容是 MOSFET 的输入电容),用下式表示。

其中,Qg 是外部 MOSFET 的栅极总电荷,fsw 表示开关频率。在软开关拓扑中,Qg 等于 FET 或 IGBT 的栅源电荷 (Qgs)。因此,高、低边驱动器的总栅极驱动损耗是 Pcharging 的 4 倍。

由于主要的功率损耗是栅极驱动损耗,因此计算驱动器损耗的最简单快捷的方法是将栅极驱动损耗(Pgate_drving)和 VDD上的动态损耗相加。这些损耗在中等电压级别的高低边驱动器产品中占 90% 以上。
一旦计算出驱动器内部消耗的功率,我们就可以估算驱动器的结温。这可以根据热阻或类似热设计(散热和气流)的特性进行评估。热方程如下:

其中
TJ= 驱动器芯片的结温
Rjx= 温度上升与总功率耗散相关的热阻 (θ) 或特性参数 (Ψ)
Tx= 数据手册热特性表中定义的 x 点温度。
热信息如图5和表1所示。封装的热特性是几何形状、边界条件、测试条件等多个参数的函数。这就需要数值分析工具或建模技术,而这些工具或技术通常操作繁琐。根据数据手册中的热信息来精确估算结温是非常困难的。
因此,回顾一下热信息的定义很有必要。
θja是结对空气热阻。测量芯片结和空气之间的热流。主要适用于没有任何外部散热器的封装。
θjc是结到外壳热阻,测量芯片结和封装表面之间的热流。主要适用于使用某些外部散热器的封装。
Ψjt是结点到封装顶部热特性参数,提供了芯片温度和封装顶部温度之间的相关性。可用于在应用中估计芯片温度
Ψjb是结点到电路板热特性参数,提供了芯片温度和电路板温度之间的相关性。可用于估算应用中的芯片温度。
图 5. 封装的热阻和特性参数。
表 1. 热阻和特性参数的定义。
一般来说,半导体数据手册中提供的热信息并不能涵盖所有应用场景。在以下示例中,我们仅使用 θja 计算 Tj。
如果 Tj 太接近建议的工作温度,可以考虑以下几种情况。
1. 增加外部栅极电阻以分散功率损耗:如果在驱动器和 MOSFET 之间不插入外部栅极电阻,功率将完全耗散在驱动器封装内部。使用外部栅极电阻可以在驱动器内部栅极电阻和插入的外部电阻之间分担功率损耗。分担比例由两个电阻之间的比率决定。外部栅极电阻越大,驱动器内部的功率损耗就越小。
2. 降低开关频率。开关频率对功率损耗的影响最大,因此只要应用允许,就可以降低开关频率。
3. 使用散热器。扩大 PCB 面积,在驱动器周围增加覆铜。
4. 尽可能降低电源电压 VDD。最新一代的驱动器和 MOSFET 均提供此选项。
降低开关频率或电源电压并不总是可行的,而且扩大印刷电路板或增加散热手段往往受到限制。大多数情况下,人们会出于各种原因使用外部栅极电阻,例如限制寄生或高 dV/dt 引起的振铃,调整栅极驱动强度以减少 EMI。这也会对功率损耗分布产生影响。添加外部栅极电阻后,栅极驱动功率损耗的计算如下:

其中,RON和 ROFF是内部上拉和下拉电阻,Rgon和Rgoff是外部栅极电阻。简单来说,如果RON=ROFF=Rg,与没有外部栅极电阻相比,Psw将是总功率耗散的一半。
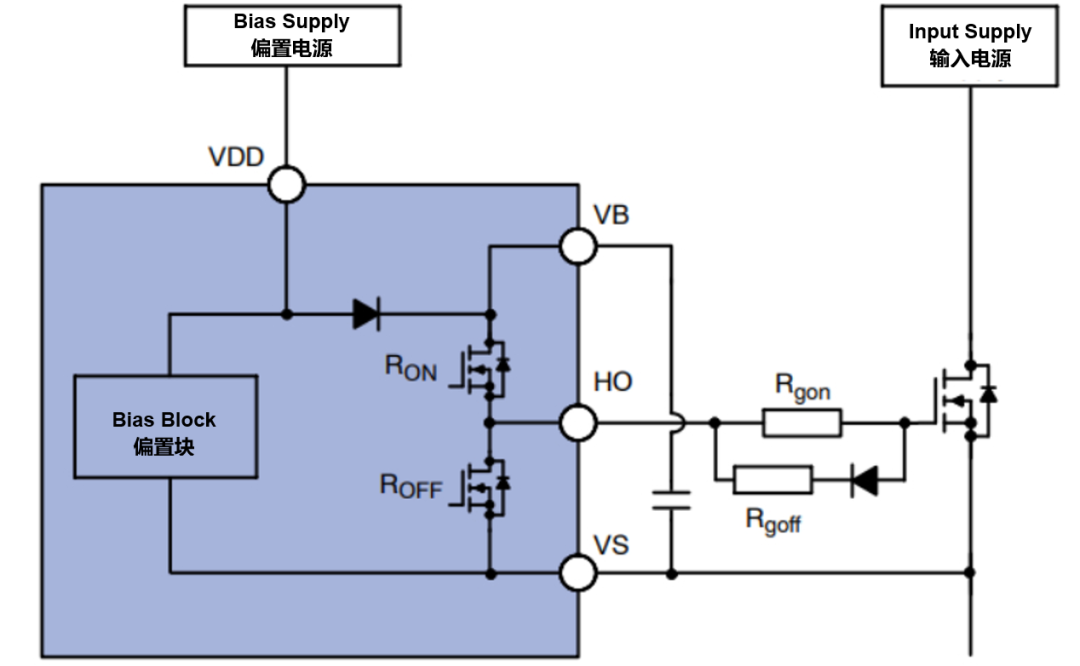
图 6. 内部上拉和下拉电阻。
以 NCV51511 为例,根据 Vdd/峰值上拉(或下拉)电流计算,RON为 2 Ω,ROFF为 1 Ω。如果在输出引脚和 MOSFET 栅极之间插入 1 Ω,则栅极驱动损耗将降至 83%。
该白皮书还介绍了电平转换电路中的功率损耗、进行 NCV51511 的功率损耗计算和热估算、在 FAN73912 上的应用等,欢迎扫码下载完整版白皮书。

⭐点个星标,茫茫人海也能一眼看到我⭐